|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
맷돌(G.MTDL.A)은 맷돌-C(한국형 C 언어)를 지원하는 초소형 범용 손톱컴퓨터 입니다.
기계닉스에서 자체 개발한 64BiT 가상기계형 운영체제인 VMOS 로 기동되며, 맷돌-C 로 제작한 가상기계를 설치하면 이 VMOS 가 기동시켜줍니다. 맷돌(G.MTDL.A)은 이 VMOS 가 적용된 가장 기본적인 맷돌이며 MCU 자체에 대한 이해 없이도 기본적인 C 언어만 알면 VMOS 가 지원하는 수 많은 API 함수를 호출하는 것만으로도 모든 주변기기를 제어할 수 있습니다.
완전히 독립적으로 동작되는 두 개의 통신포트는 사용자가 마음대로 수신저장소의 크기를 지정할 수 있으며, 수신 이벤트를 발생 시키는 수신개수를 지정 가능하여 묶음통신을 하는데 아주 편리합니다. 총 24 개의 I/O 핀(8비트 포트 3개)을 지원하며 모든 핀은 독립적으로 입/출력 설정이 됩니다.
VMOS 는 여러 가상기계를 지원하는데 맷돌(G.MTDL.A)은 SPI(MASTER), I2C(MASTER) 가 가상기계로 되 있으며 24 개의 모든 I/O 핀에 SPI, I2C 포트를 개수에 무관하게 마음대로 생성할 수 있어 SPI, I2C 를 지원하는 수 많은 소형 센서나 EEPROM, FLASH 를 제한 없이 연결하여 사용 가능합니다. 또한 관련 API 지원으로 SPI 나 I2C 에 대한 상세한 지식이 없는 초보자도 쉽게 다룰 수 있습니다.
맷돌(G.MTDL.A)은 3.3V, 5V 모두를 지원하며 I/O 포트에는 각각 VCCIO 가 별도 지원되므로 이 VCCIO 에 걸어주는 전압이 I/O 의 입/출력 전압이 되는 구조를 가지고 있습니다. 따라서, 맷돌(G.MTDL.A)의 3.3V, 5V 구동과 관계없이 I/O 포트는 3.3V, 5V 둘 다 혼합사용이 가능합니다. VCCIO 를 사용하지 않는 경우 각각의 핀에 별도의 풀업 저항을 달아주면 핀 단위로 개별적인 입/출력전압을 설정할 수 있게 됩니다.
맷돌(G.MTDL.A)에는 G.CO.RS232.XV 를 직접 연결할 수 있는 4핀 통신포트가 내장돼 있어 별도의 통신회로 없이 PC 와 G.CO.RS232.XV 케이블만으로 간단하게 연결할 수 있습니다.
맷돌(G.MTDL.A)은 C 언어를 조금 알고 있으나 MCU 는 전혀 모르는 사람들이나 제어기기 쪽은 어느 정도 알고 있으나 C 언어 등 프로그램은 전혀 경험이 없는 사람들을 대상으로 하고 있습니다. 말 그대로 초보자들을 제어의 세계로 인도하기 위하여 창조된 것입니다. 학생이나 기술자 등이 MCU 를 접하기 전에 먼저 접한다면 MCU 를 보다 쉽게 이해하는데 큰 도움이 될 것입니다. 즉, C 언어를 통한 제어와 그 주변기기에 대한 지식을 먼저 맷돌(G.MTDL.A)로 쌓은 다음에는 실제 MCU 의 레지스터 등만 알면 되기 때문입니다.
결코 프로그램을 통한 제어의 세계가 전문가들만의 세상이 아니라는 것을 기계닉스가 맷돌(G.MTDL.A)로 증명해 보이겠으며 초등학생도 C 언어로 제어를 하는 대한민국을 만들고야 말겠습니다. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2번 핀을 제외한 1-10 번 핀은 맷돌(G.MTDL.A)의 차기 기능이나 기계닉스 전용기능으로 사용자는 절대 손대서는 안되며 아무것도 연결해서는 안됩니다. 또한, 이 핀들은 전부 3.3V 로만 구동되므로 사용자가 임의로 잘못 연결하는 경우 맷돌(G.MTDL.A)이 파손될 수 있습니다.
P0.0, P0.1, P0.5 의 3개 핀은 출력 시에만 5V 동작이 지원되며, 입력 시에는 3.3V 만 사용해야 합니다. 즉, 입력 시 해당포트의 VCCIO 를 5V 로 설정하는 경우는 이 3개 핀은 입력 동작을 수행하지 않습니다. 이점 주의 바랍니다.
만일 P0 포트의 다른 핀을 입/출력으로 사용하는 경우는 해당 포트의 VCCIO 를 사용하지 않고 개별적으로 나머지 핀을 1K 의 저항을 사용하여 5V 로 풀업해주면 됩니다. 이 경우 이 3개 핀은 맷돌(G.MTDL.A)의 39번 핀에서 나오는 3.3V 에 1K 저항으로 풀업합니다. P0 전체는 그냥 일반 출력으로만 사용하는 경우는 해당 포트의 VCCIO 를 5V 에 연결하면 됩니다. 그러면, P0 포트 전체를 5V 출력으로 동작 시킬 수 있습니다. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
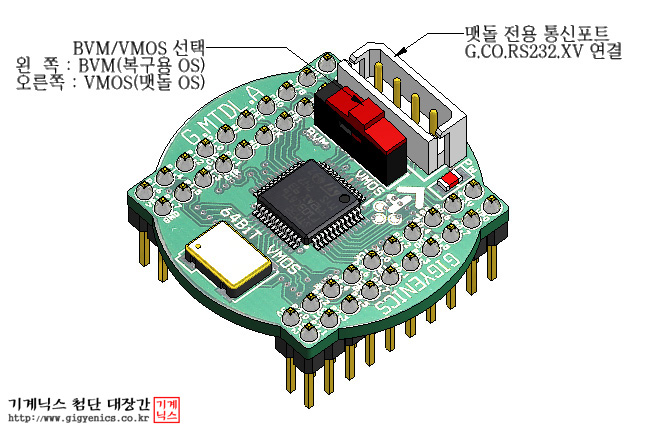
맷돌(G.MTDL.A)은 자체적으로 통합개발환경과 통신을 위한 전용 통신포트를 한 개 내장하고 있습니다.
이 곳에 기계닉스의 G.CO.RS232.XV 를 PC 의 통신포트와 연결하면 통합개발환경에서 맷돌(G.MTDL.A)과 통신할 수 있습니다. 이 포트는 맷돌(G.MTDL.A)의 운영체제를 설치 하거나, 사용자가 만든 맷돌(G.MTDL.A)용 가상기계를 설치하거나, 검증을 수행하는데 사용됩니다.
아래쪽의 좌/우전환 스위치는 맷돌(G.MTDL.A)을 기동시키는 운영체제를 선택하는 기능을 가지며, 왼쪽으로 선택한 뒤 맷돌(G.MTDL.A)을 재기동 하면 기본 적인 기능만 제공되는 복구용 운영체제가 기동되고, 오른쪽으로 선택한 뒤 맷돌(G.MTDL.A)을 재기동 시키면 VMOS 라는 맷돌(G.MTDL.A)의 기본 운영체제가 기동됩니다.
대부분의 경우 복구용 운영체제를 선택할 일은 없으나 사용자의 잘못된 조작 등으로 맷돌(G.MTDL.A)의 운영체제 VMOS 가 제대로 기동하지 못하거나 손상된 경우는 복구용 운영체제인 BVM 을 선택하여 확실하게 다시 기본 운영체제를 설치하여 문제를 해결할 수 있습니다. 즉, 복구용 운영체제는 어떤 경우라도 맷돌(G.MTDL.A)과 통합개발환경을 연결시켜 주어 새로운 운영체제를 다시 설치할 수 있게 만들어 줍니다. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||