|
|
|||
|
|||
|
|
|||
|
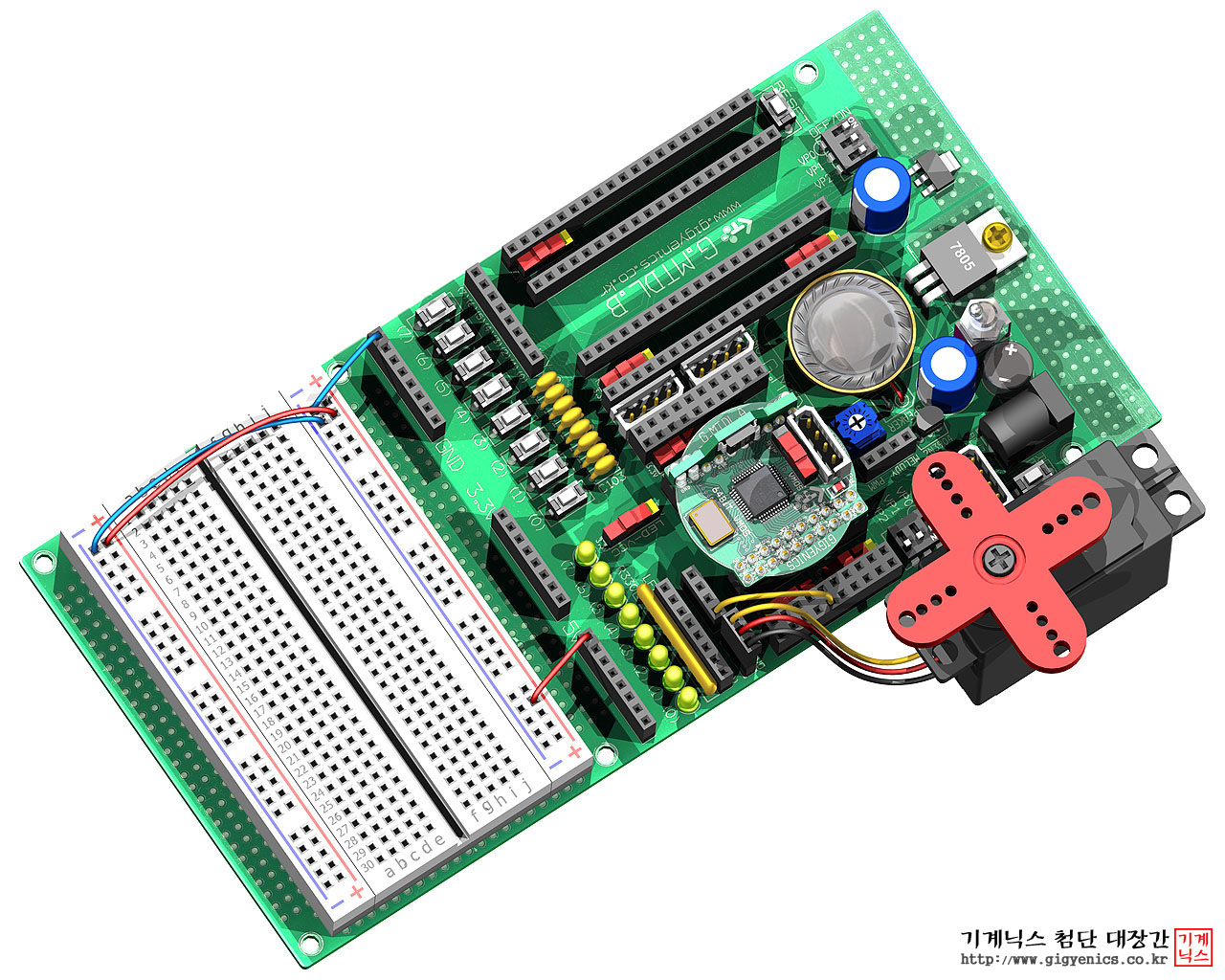
맷돌에 내장된 PWM 발생기를 제어하여 RC 서보모터를 직접 PWM 으로 제어해봅니다. 맷돌은 3개의 PWM 장치와 총 12개의 PWM 채널을 가지고 있습니다.
PWM 은 RC 서보모터 뿐만 아니라 일반 DC 모터제어등에 더 많이 사용되는데 속도제어등을 정밀하게 수행할수 있습니다. 사용자는 이 예제를 사용하여 PWM 설정/출력을 이해한 뒤 직접 DC 모터를 PWM 으로 제어하는 단계로 진입할수 있을 것입니다.
RC 서보모터는 아날로그/디지탈 아무것이나 사용해도 상관 없습니다(제조사도 상관없음).
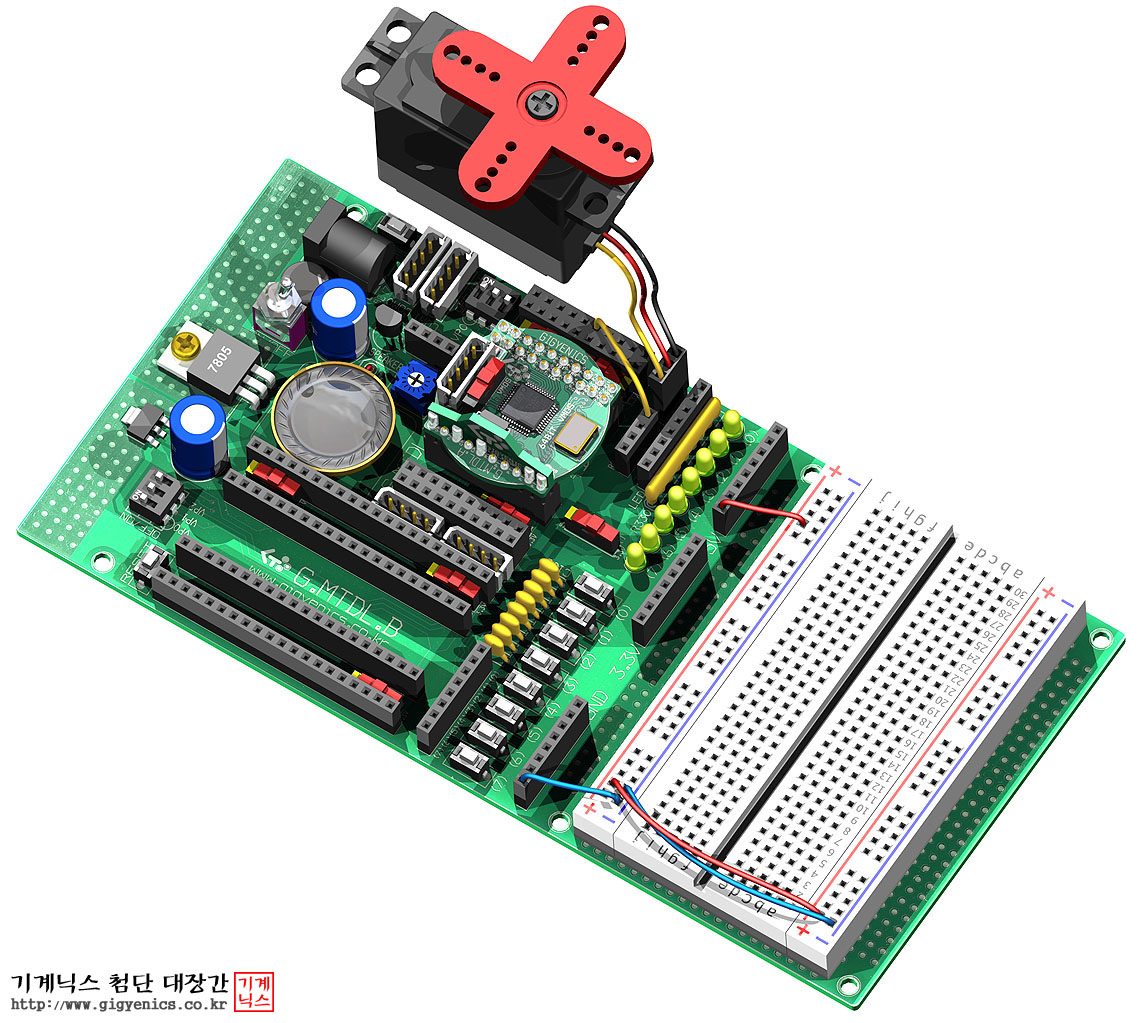
맷돌 전용 연습기판이 없어도 예제 안에 첨부된 회로도를 사용하여 사용자가 직접 만능기판에 꾸며도 됩니다. 맷돌 전용 연습기판을 사용하는 경우는 아래 실제 회로를 꾸민 것을 참고하여 직접 회로를 꾸며주면 됩니다.
부가적인 설명은 예제안의 설명을 참고 바랍니다. |
|||
|
|
|||
|
|||
|
|
|||
|
|||
|
|
|||
|
|||
|
|
|||
|
PWM 을 일반 DC 모터를 제어하는 용도로 사용하는 경우는 보통 L298 이라는 전용 드라이버 IC 를 사용하게 됩니다. 이 경우 PWM 듀티비를 이용하여 DC 모터의 속도를 간단하게 제어할수 있습니다.
PWM 으로 스텝모터를 구동하는 경우는 L297 + SLA7024 의 결합을 사용하는데 이 때는 PWM 주파수의 변경으로 스텝모터의 속도를 간단하게 조정할수 있습니다(그러나, 펄스 개수를 지정할수 없으므로 스텝모터가 가진 각도제어는 할수 없습니다. 이 기능은 곧 맷돌에 추가될 예정입니다).
맷돌은 내장된 PWM 생성기를 자유롭게 다룰수 있는 여러 API 를 지원하므로 사용자는 간단하게 일반 DC 모터나 스텝모터를 제어할수 있습니다(보다 강력한 스텝모터제어기는 곧 내장될 예정). |
|||
|
|
|||
|
|
|||
|
|
|||
|
|