|
|
|||||||
|
|||||||
|
|
|||||||
|
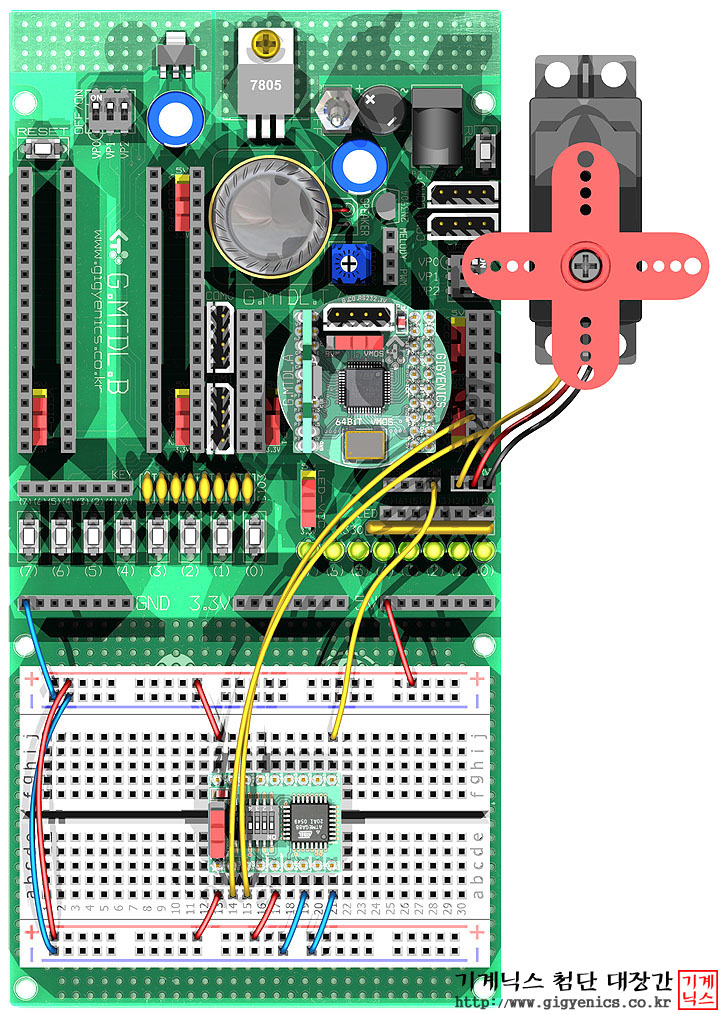
맷돌을 사용하여 G.M.RC.BASiC 계열 RC 서보 제어기를 제어 하는 기본 예제입니다.
맷돌은 자체 12개 서보를 제어할수 있는 RC 서보모터 제어기를 내장하고 있으나 부족한 경우 G.M.RC.BASiC 계열 RC 서보모터 제어기를 추가하여 거의 무제한의 RC 서보를 제어할수 있습니다(G.M.RC.BASiC/G.M.RC.BASiC.MD/G.M.RC.BASiC.BD 모두 적용됨).
실험에는 맷돌의 COM0 포트를 사용하여 G.M.RC.BASiC.MD 를 제어 합니다.
RC 서보모터는 아날로그/디지탈 아무것이나 사용해도 상관 없습니다(제조사도 상관없음).
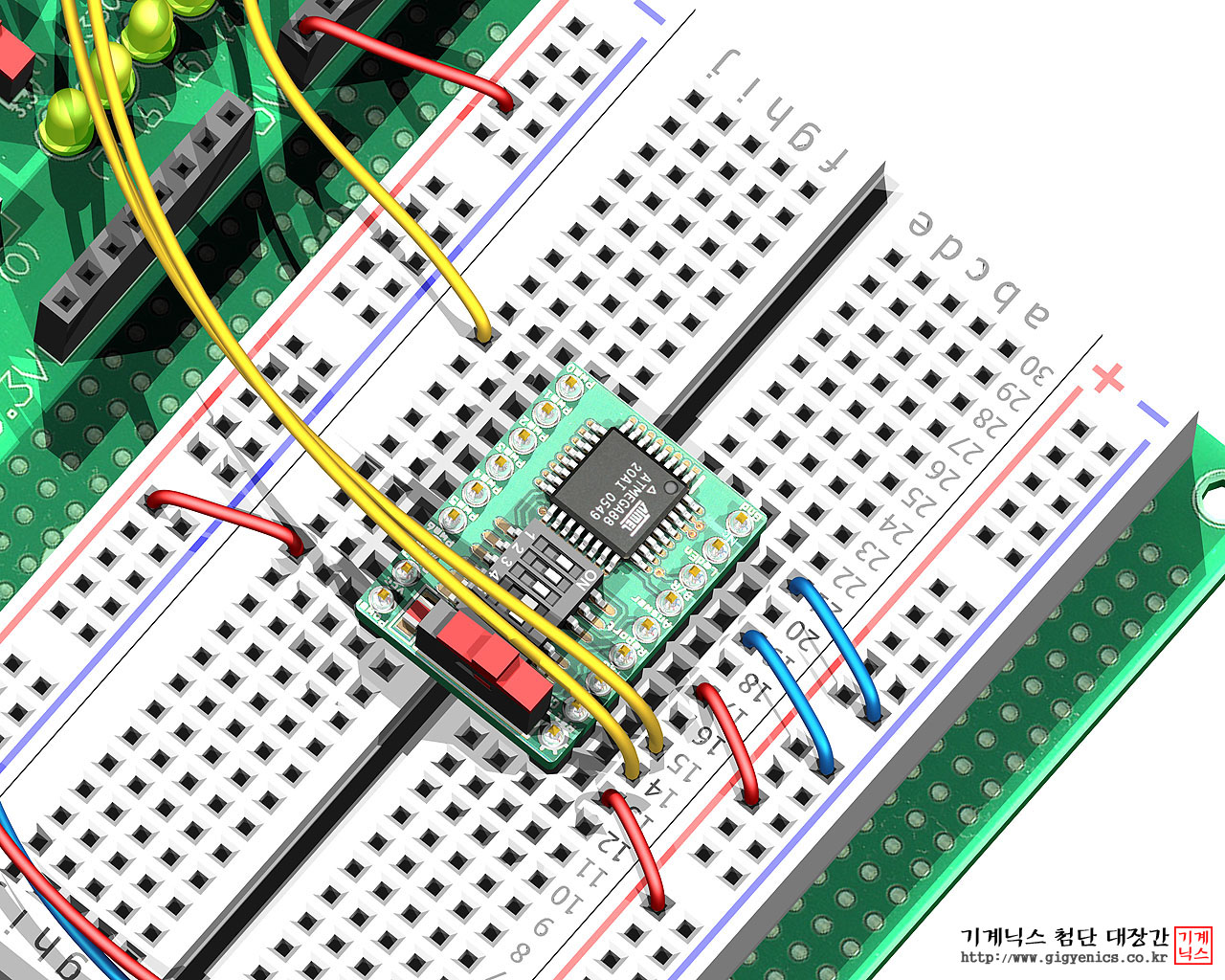
맷돌 전용 연습기판이 없어도 예제 안에 첨부된 회로도를 사용하여 사용자가 직접 만능기판에 꾸며도 됩니다. 맷돌 전용 연습기판을 사용하는 경우는 아래 실제 회로를 꾸민 것을 참고하여 직접 회로를 꾸며주면 됩니다.
부가적인 설명은 예제안의 설명을 참고 바랍니다. |
|||||||
|
|
|||||||
|
|||||||
|
|
|||||||
|
|||||||
|
|
|||||||
|
|||||||
|
|
|||||||
|
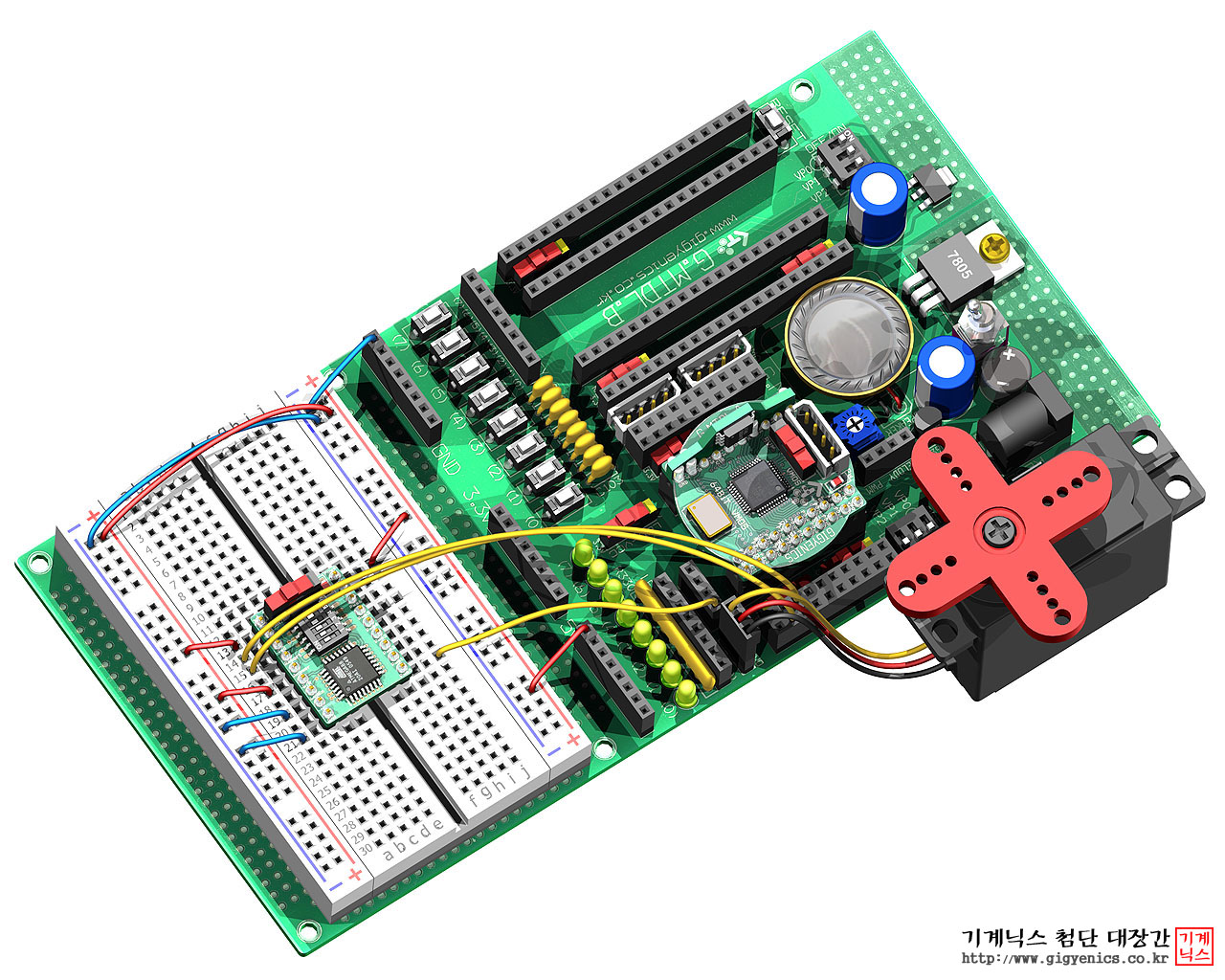
예제에는 실험적으로 2개의 RC 서보모터만 사용하였으나 모든 G.M.RC.BASiC 계열은 개당 8 개의 RC 서보모터를 완전히 독립적으로 동시제어 가능하며, 동일 통신선 상에 제어기 끼리 64 개까지 연결하여 최대 512개까지 RC 서보모터를 동시/독립 제어가능하므로 8개 이상의 RC 서보모터를 사용해도 상관 없습니다. 단, 이 경우는 사용자가 해당 구성에 맞게 예제를 참고하여 수정해주어야 합니다.
예제에 사용된 G.M.RC.BASiC.MD 는 G.M.RC.BASiC 계열중 IC 형식을 제외하고는 가장 크기가 작은 것으로 소형 로봇등의 제어에 적합하며, 모든 G.M.RC.BASiC 계열은 제어 방법과 내용이 완전히 동일하므로 한 개만 잘 다룰수 있으면 나머지도 어렵지 않게 사용 가능합니다.
맷돌은 자체적으로 모든 G.M.RC.BASiC 계열 제어기를 쉽게 다룰수 있도록 다양한 API 를 지원하고 있습니다. |
|||||||
|
|
|||||||
|
|
|||||||
|
|
|||||||
|
|