|
|
|||
|
|||
|
|
|||
|
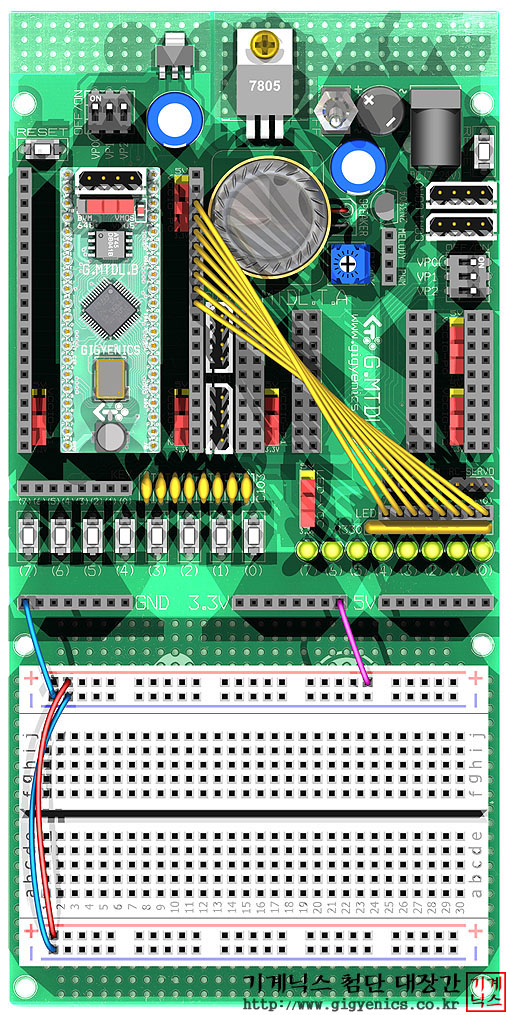
맷돌에 내장된 두 개의 독립적인 통신포트를 제어하는 기본 예제입니다.
통신포트를 설정하고 수신 이벤트 기능을 사용하여 수신하는 방법을 학습할 수 있습니다. 실제는 수신 이벤트 시 수신된 값을 P0 포트에 연결된 LED 에 바로 출력하여 제트카 LED 를 구현하게 됩니다. 맷돌-가상구동 예제를 돌리면 제트가 LED 를 구현할 값들이 PC 의 통신 포트를 통하여 맷돌에 전송되게 되며, 맷돌은 수신이벤트에서 이 값을 읽어 바로 LED 에 출력함으로써 이를 보여주는 방식입니다. 일반적으로 통신의 경우는 묶음통신을 하지만 여기서는 1 바이트 단위의 가장 기본적인 통신을 사용합니다.
G.CO.RS232.XV 을 이용하여 맷돌의 COM0 포트와 PC 를 연결한 뒤, 맷돌가상구동용 예제를 돌리면 소위 제트카 LED 가 구현돼는 것을 볼수 있습니다.
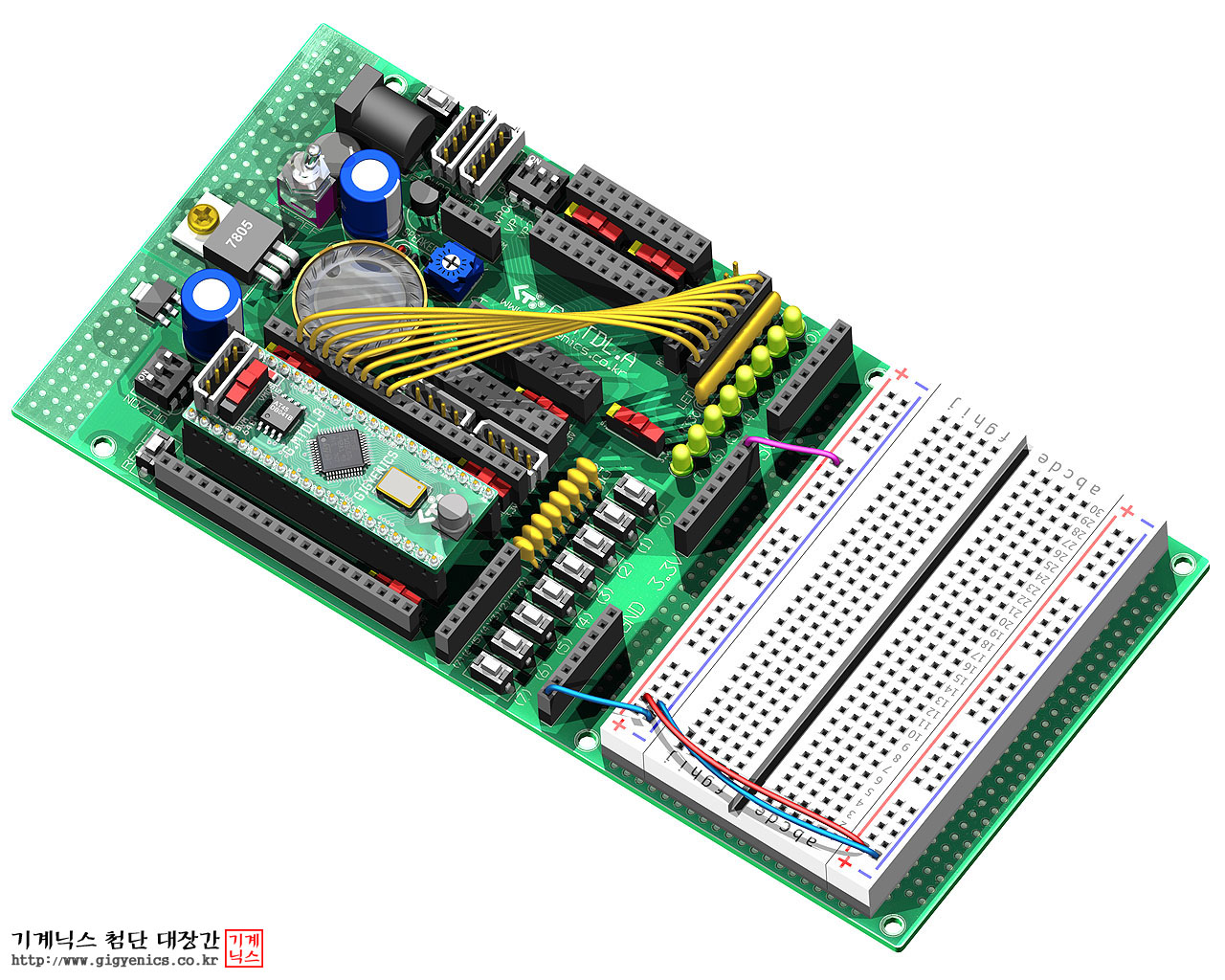
맷돌 전용 연습기판이 없어도 예제 안에 첨부된 회로도를 사용하여 사용자가 직접 만능기판에 꾸며도 됩니다. 맷돌 전용 연습기판을 사용하는 경우는 아래 실제 회로를 꾸민 것을 참고하여 직접 회로를 꾸며주면 됩니다.
부가적인 설명은 예제안의 설명을 참고 바랍니다. |
|||
|
|
|||
|
|||
|
|
|||
|
|||
|
|
|||
|
|||
|
|
|||
|
|
|||
|
|
|||
|
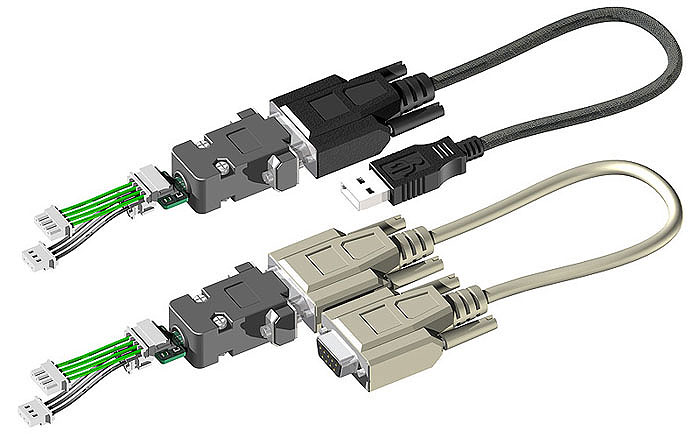
직렬연장 케이블이나 USB<=>직렬 변환케이블을 G.CO.RS232.XV 과 연결한 모습입니다. 맷돌에 가상기계를 설치하거나 예제의 결과를 보기 위한 통신에 사용합니다.
기계닉스 제품을 취급하는 판매처에서도 쉽게 구입 가능하니 참고 바랍니다. |
|||
|
|
|||
|
|