|
|
|||
|
|||
|
|
|||
|
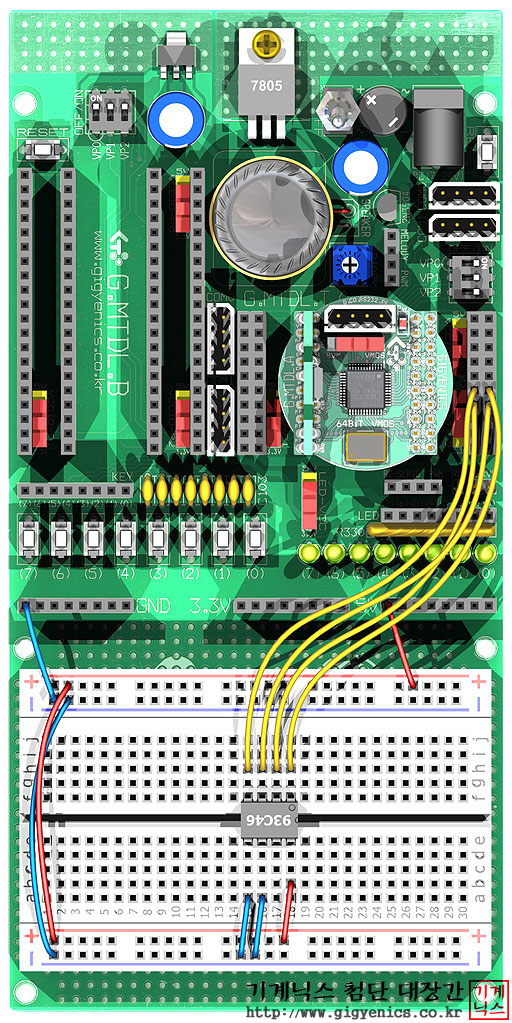
맷돌에 내장된 SPI 가상기계를 사용하여 93C46 EEPROM 을 제어하는 예제입니다.
일차적으로 93C46 에 자료를 기록하고 기록한 자료를 다시 읽어 들여 COM0 통신포트로 출력하며 G.CO.RS232.XV 를 통하여 PC 로 전송하게 됩니다.
맷돌에 내장된 SPI 가상기계는 처리 속도가 빠르며 물리적인 포트가 허용하는 한 무한정 동적 생성/삭제가 가능합니다. 맷돌에는 총 3개의 포트가 있으며 각각 2개씩의 SPI 포트를 생성할수 있으므로 실제 총 6 개의 SPI 포트를 마음대로 핀을 지정하여 생성하고 운영할수 있습니다(각각의 핀배치는 사용자가 임의로 지정 가능하나 같은 SPI 포트 핀들은 모두 같은 맷돌 포트 안에 존재해야 함). 맷돌에서 제공하는 SPI 제어용 API 를 조합하면 어떤 종류의 SPI 계통 IC 도 쉽게 제어할수 있습니다.
문자열 수신은 맷돌-통합개발한경안의 문자열 수신 전용 창을 사용하는 것이 가장 좋으며(간단하게 통신포트와 전송율을 설정하여 문자열을 수신할수 있음), 하이퍼터미널이 설치된 PC 의 경우는 이것을 사용하면 보다 쉽게 수신된 문자열을 확인할수 있습니다. 또한, 예제에 포함된 맷돌-가상구동용 예제를 돌려서 맷돌-통합개발환경에서 직접 확인할수도 있습니다.
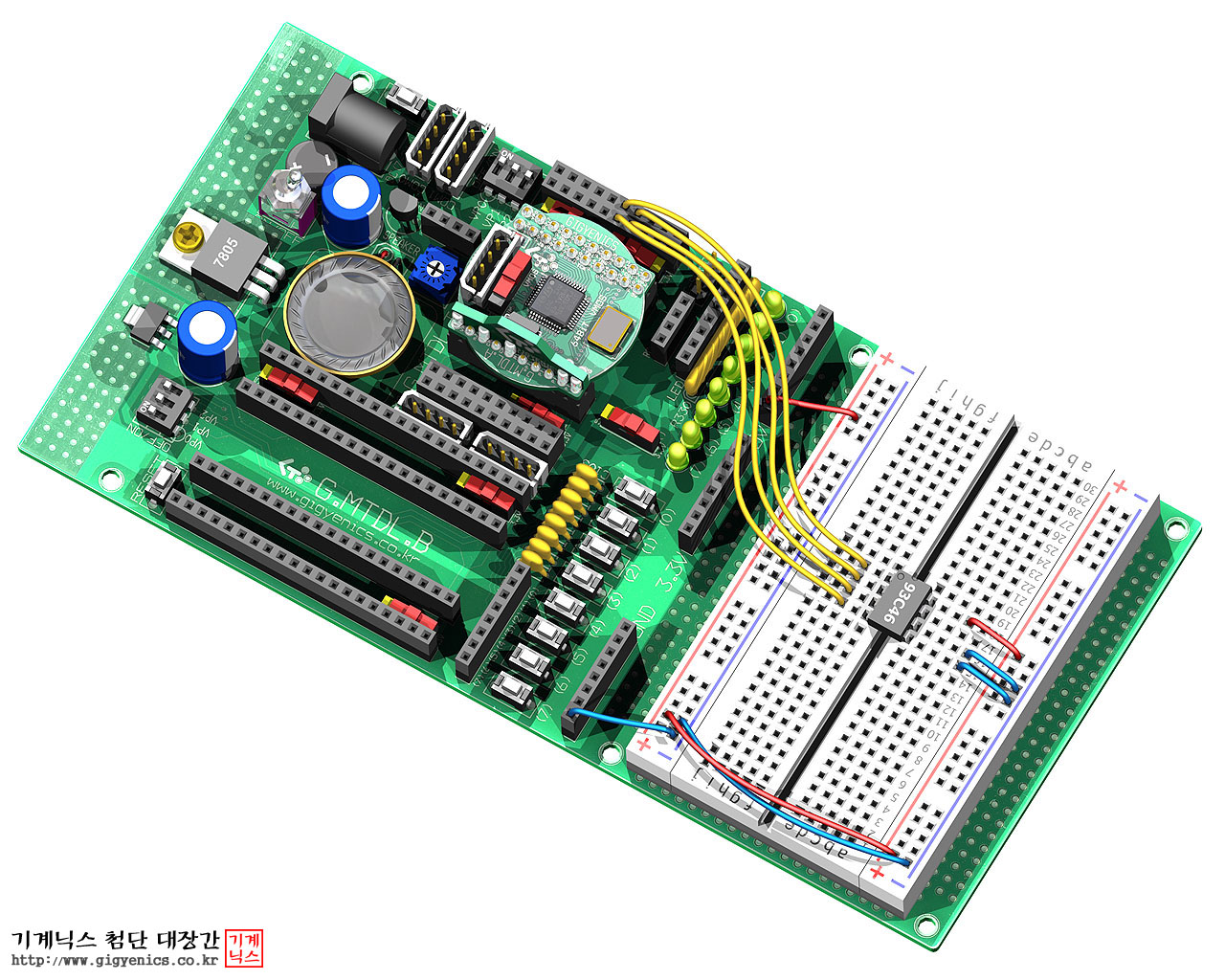
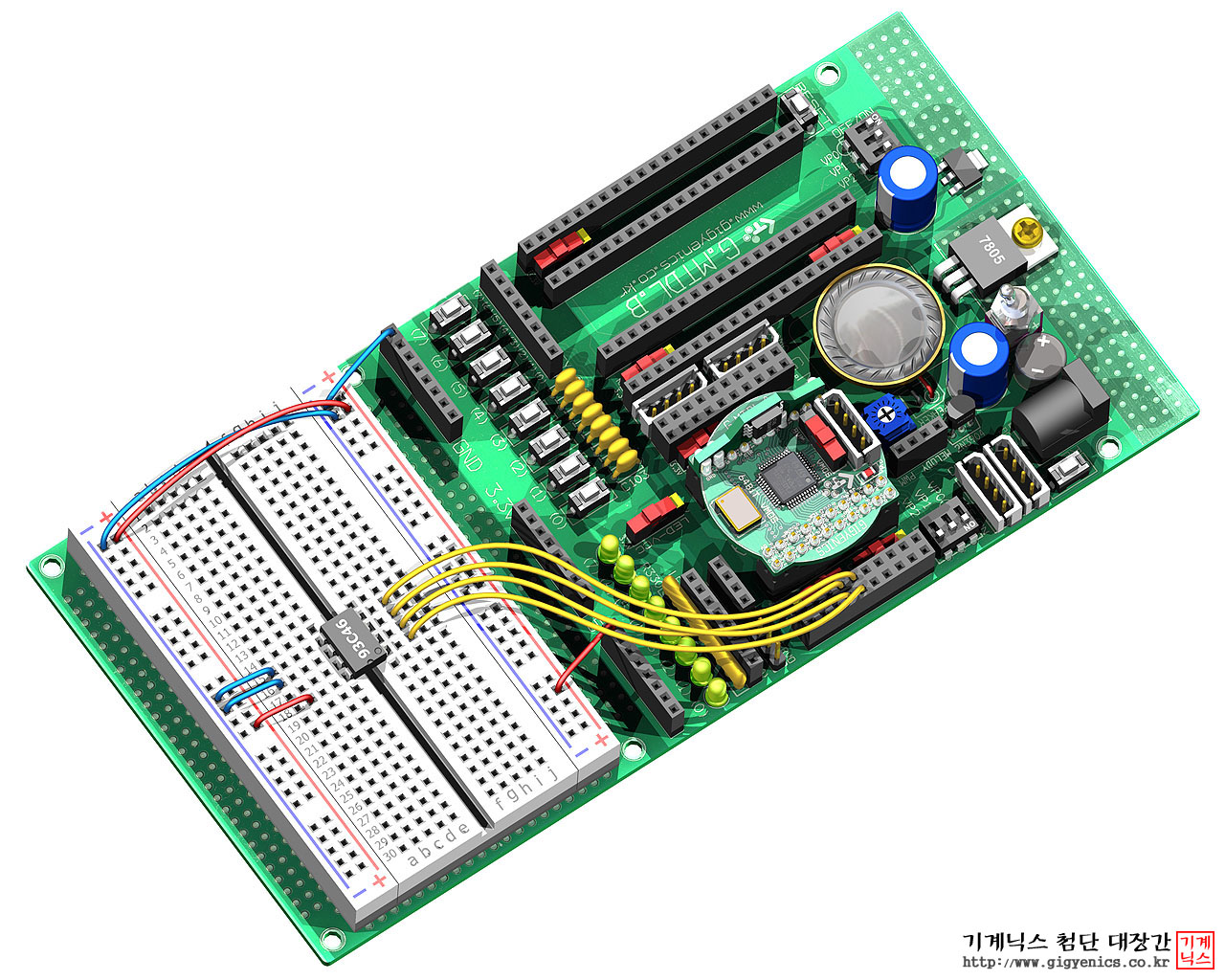
맷돌 전용 연습기판이 없어도 예제 안에 첨부된 회로도를 사용하여 사용자가 직접 만능기판에 꾸며도 됩니다. 맷돌 전용 연습기판을 사용하는 경우는 아래 실제 회로를 꾸민 것을 참고하여 직접 회로를 꾸며주면 됩니다.
부가적인 설명은 예제안의 설명을 참고 바랍니다. |
|||
|
|
|||
|
|||
|
|
|||
|
|||
|
|
|||
|
|||
|
|
|||
|
|
|||
|
|
|||
|
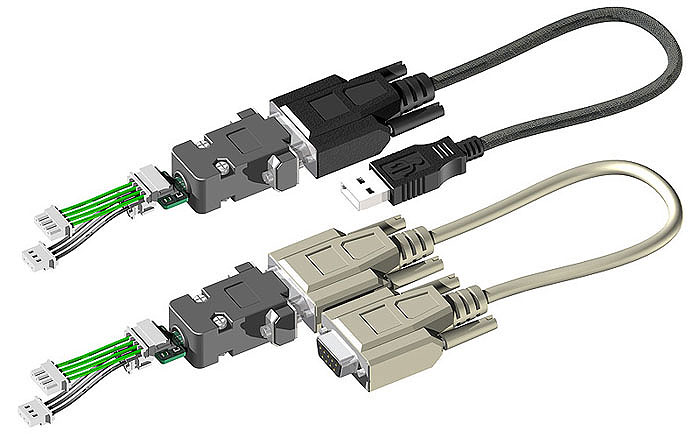
직렬연장 케이블이나 USB<=>직렬 변환케이블을 G.CO.RS232.XV 과 연결한 모습입니다. 맷돌에 가상기계를 설치하거나 예제의 결과를 보기 위한 통신에 사용합니다.
93C46 EEPROM 은 아주 구하기 쉬우며 가격도 낮아서 용량은 크지 않으나 장비들의 초기 설정값이나 사용자 정의값 등을 저장하는 용도로 여러 곳에서 사용됩니다.
기계닉스 제품을 취급하는 판매처에서도 쉽게 구입 가능하니 참고 바랍니다. |
|||
|
|
|||
|
|
|||
|
|
|||
|
|