|
|
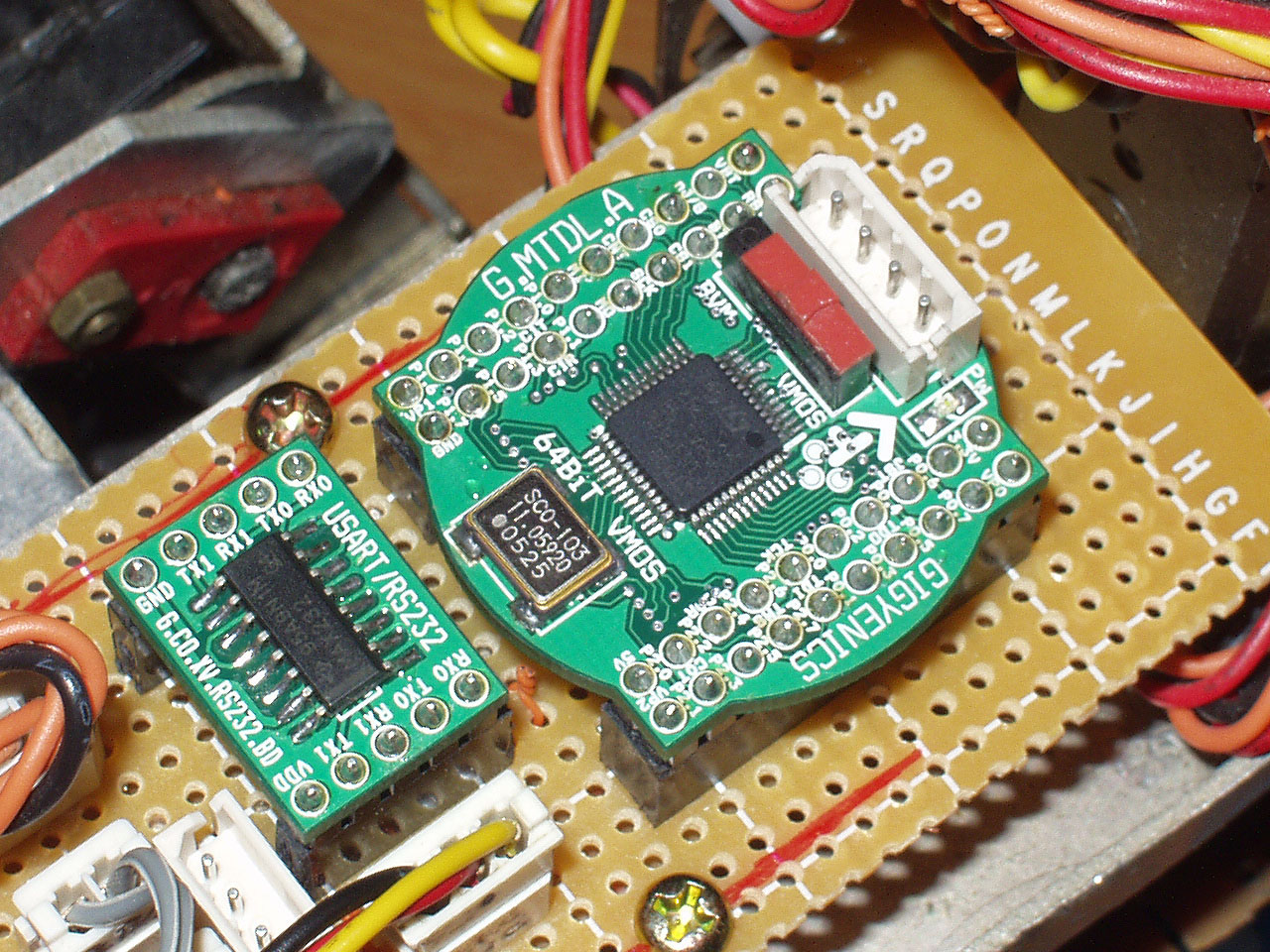
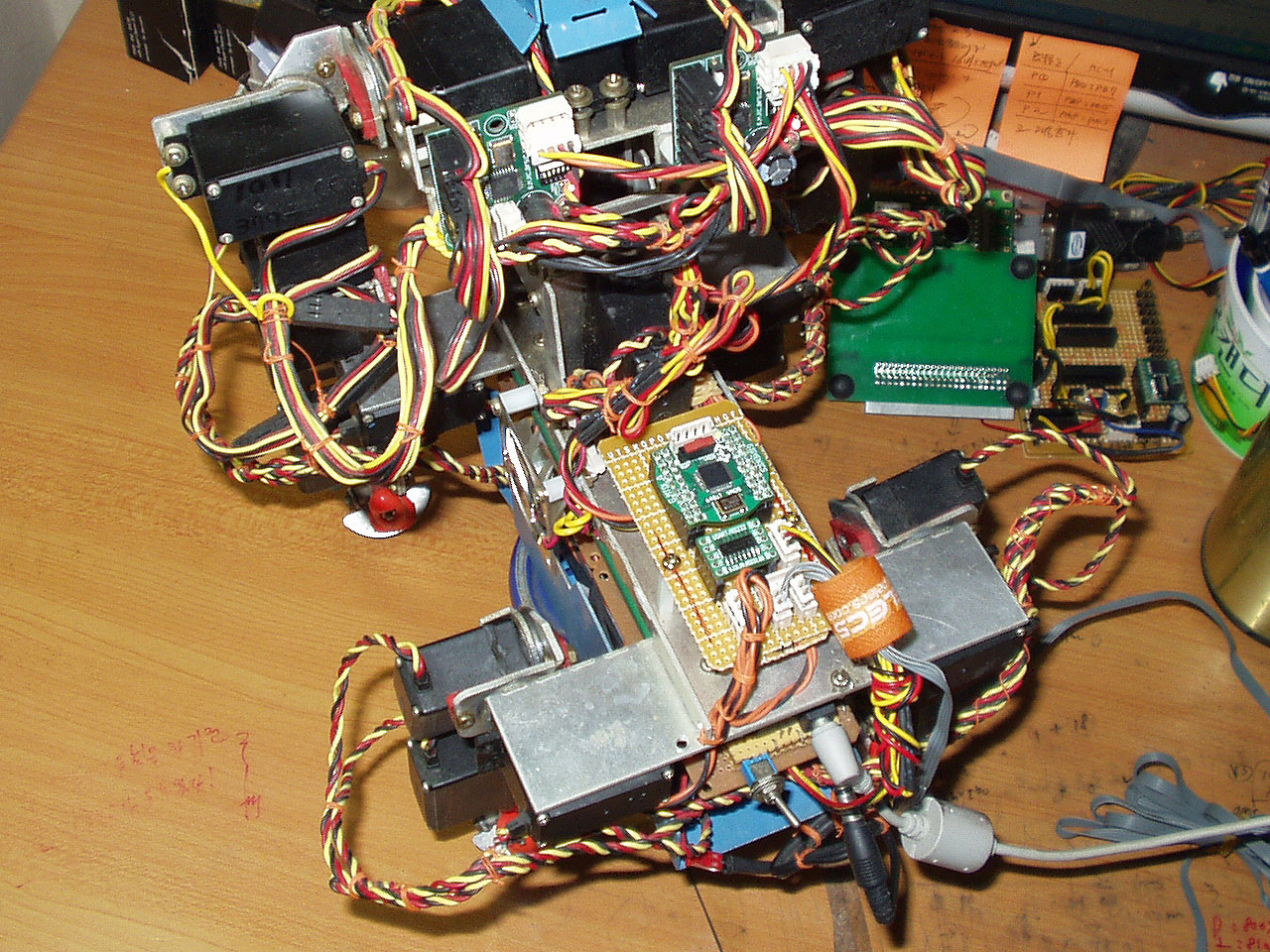
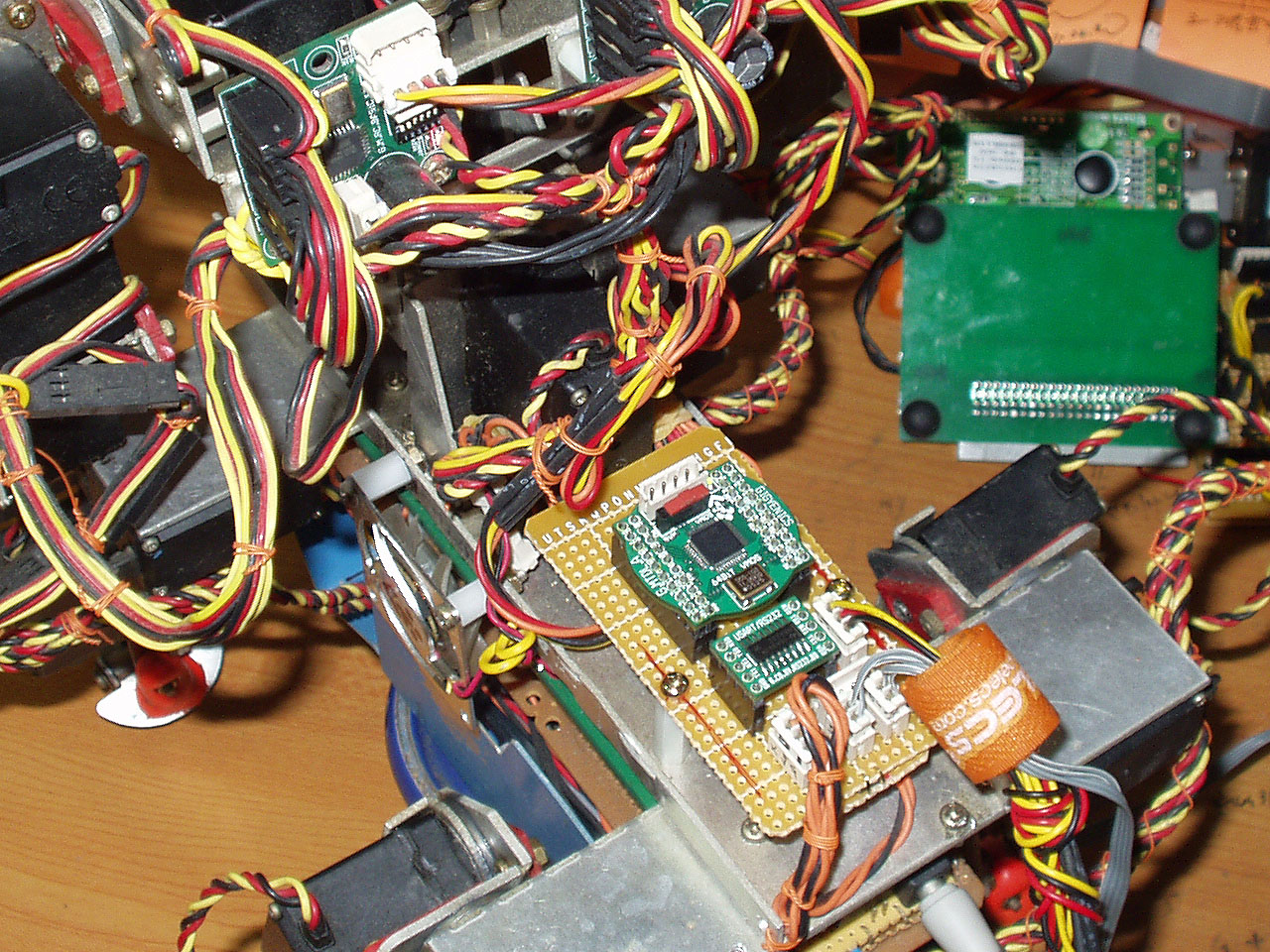
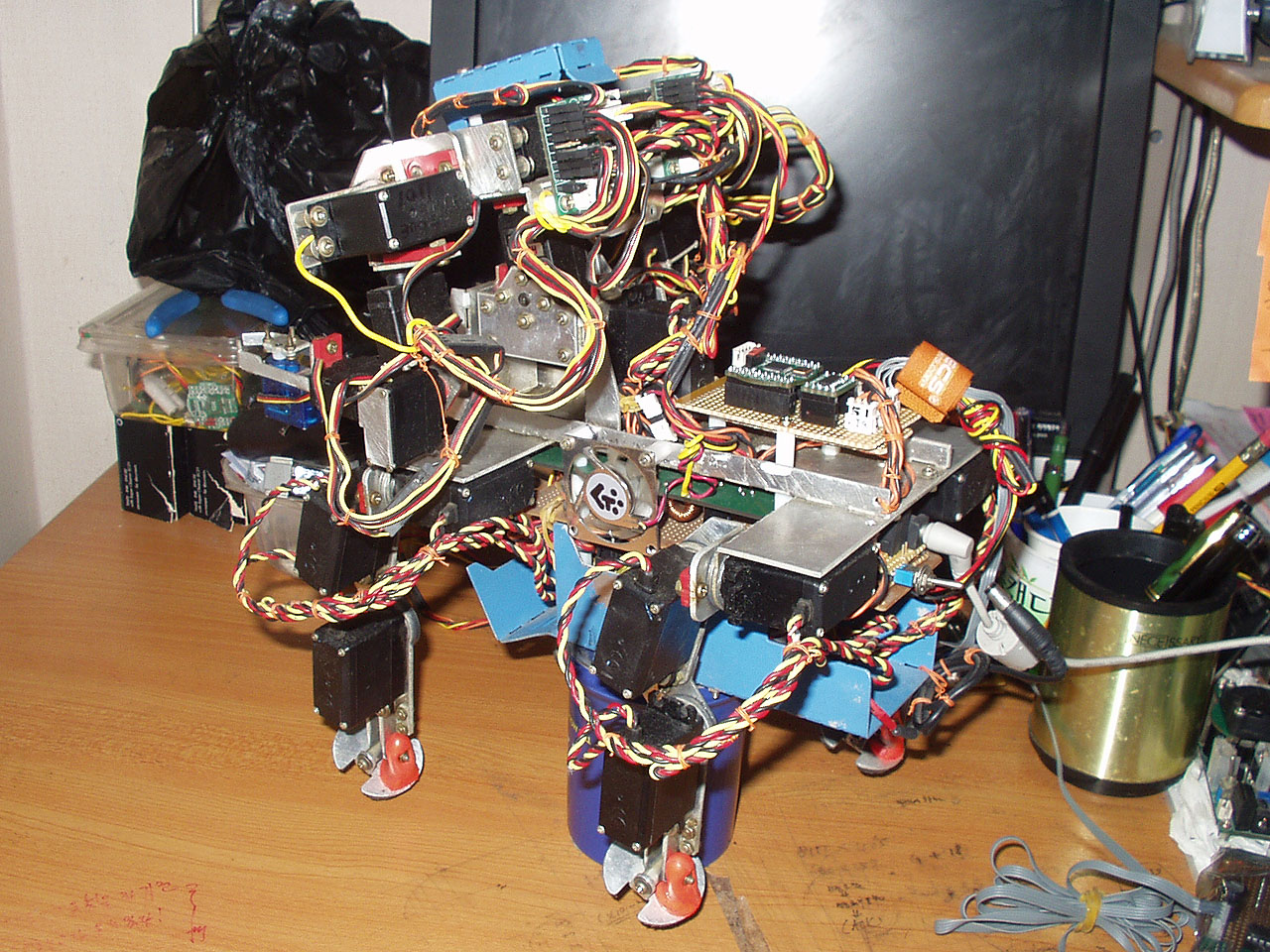
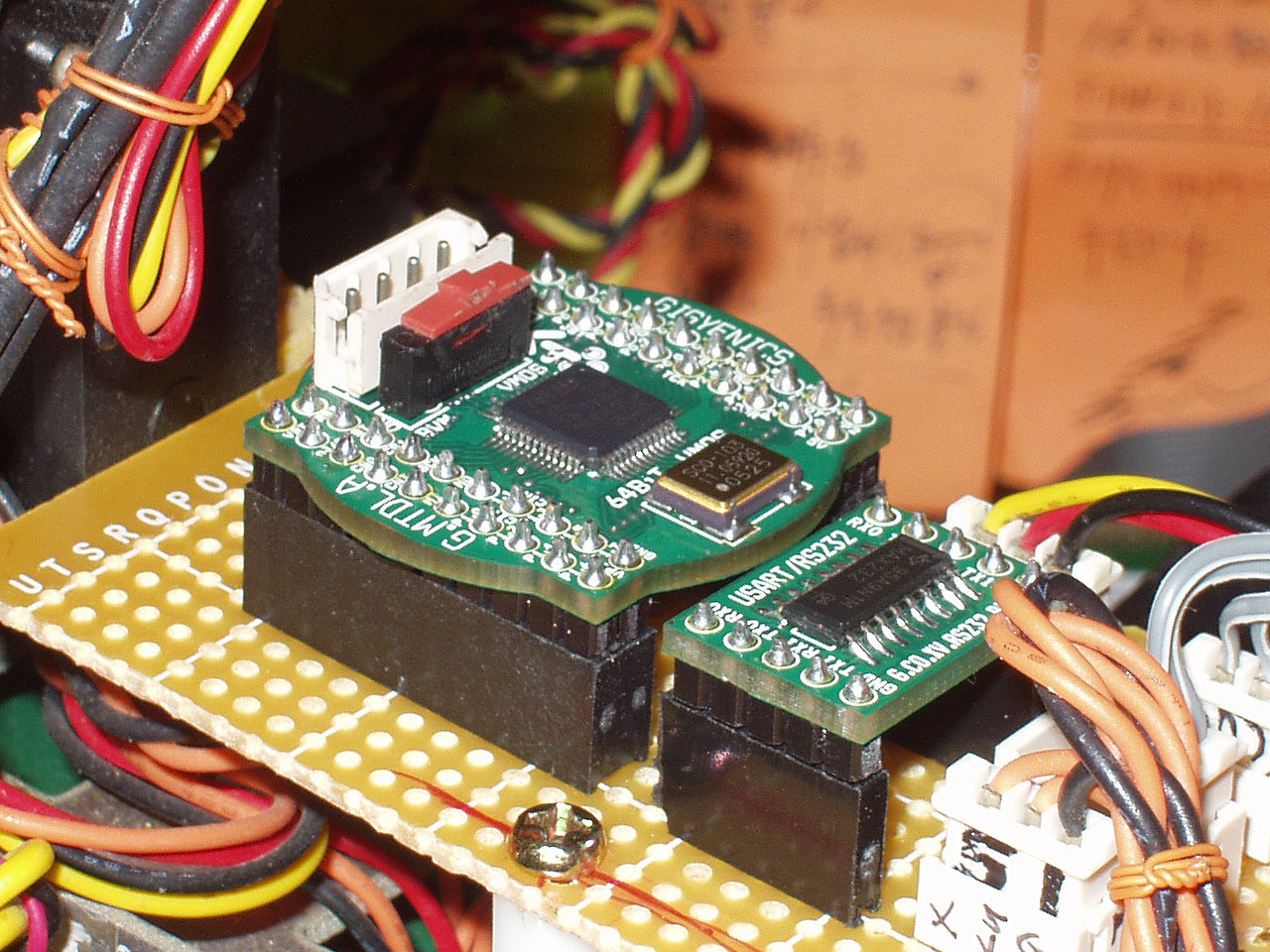
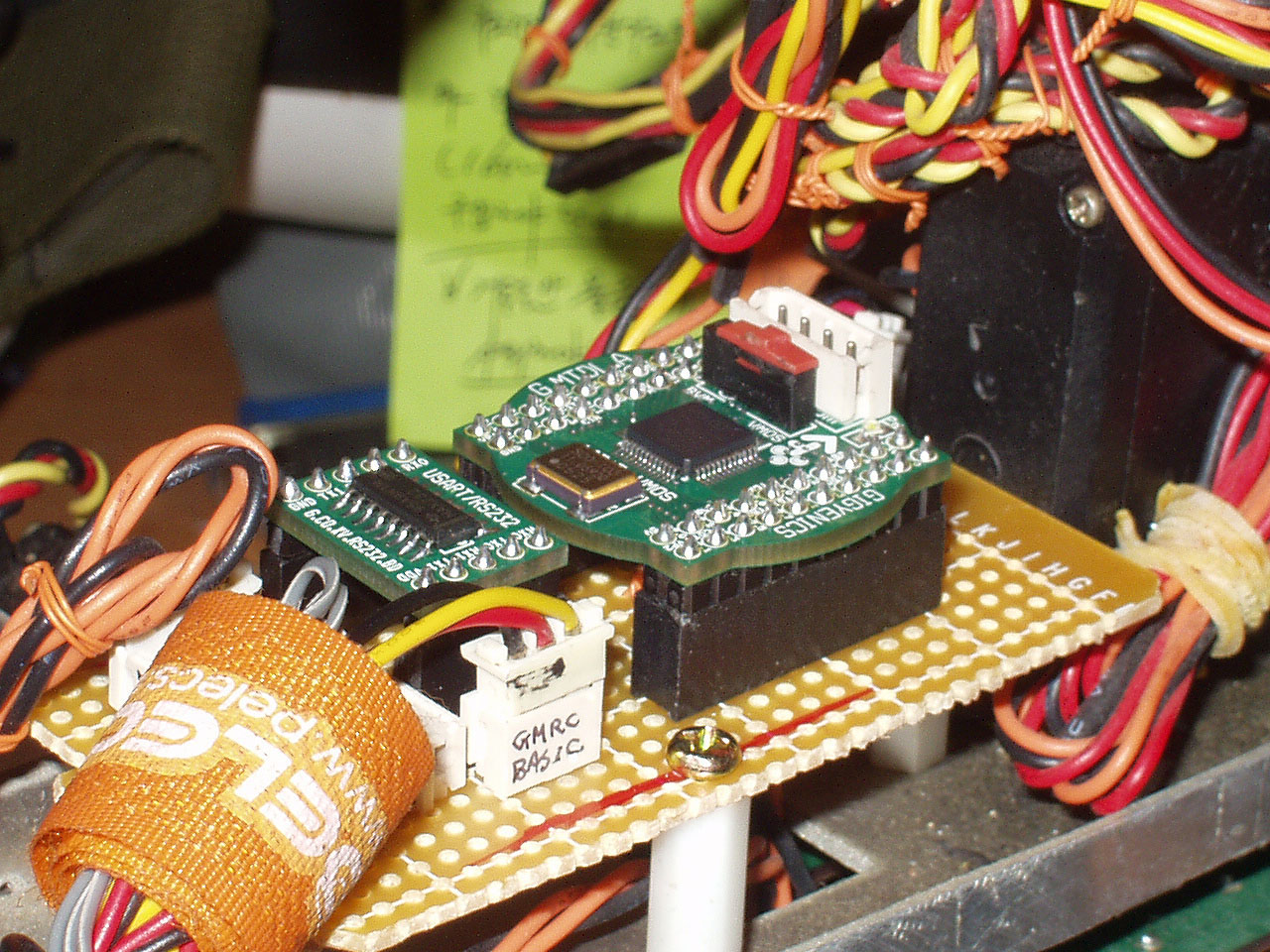
반인반마형 기계인을 G.M.RC.BASiC.BD 와 맷돌(G.MTDL.A)을 사용하여 완벽하게 제어하는 예입니다.
맷돌(G.MTDL.A)은 64비트 강력한 수학 API 를 내장하고 있으므로 보행을 하기 위한 복잡한 좌표계산과 수치제어를 완벽하게 소화할수 있습니다. 가상기계형 운영체제임이도 불구하고 전체적인 운영 속도면에서 일반 MCU 와 크게 차이나지 않는 속도를 보여줍니다. 이는 G.M.RC.BASiC.BD 자체에 많은 제어 기능이 내장되어 전체적으로는 분산제어를 수행하고 있기 때문입니다.
좌표계산/수치제어는 맷돌(G.MTDL.A)이 담당하고 실제로 서보모터는 G.M.RC.BASiC.BD 가 담당하고 있습니다. G.M.RC.BASiC 계열은 모두 강력한 서보모터 제어기능을 가지고 있으므로 동영상과 같은 빠르고 부드러운 동작이 가능합니다.
맷돌(G.MTDL.A)과 G.M.RC.BASIC 계열 제어기의 결합은 모든 사용자의 로봇 등에 최적의 해답이 될것입니다.
동영상의 맷돌(G.MTDL.A)은 신형 운영체제(VMOS:AT45DB041B)를 사용한 것입니다(약 100K 바이트 ROM 이 사용되었음).